
Článek
Osmdesátá léta byla v oblasti automobilismu dekádou veskrze progresivní. Tehdy se poprvé začala používat celá řada systémů, které mají auta dodnes.
Byl to kupříkladu bezpečnostní nafukovací vak, kterému se dnes neřekne jinak než airbag. Poprvé se začaly v masivnější míře uplatňovat víceventilové rozvody motorů. Do té doby sice existovaly, ale téměř výhradně pro závodní účely. Také vstřikování benzínu řízené elektronicky začínalo postupně vytlačovat do té doby kralující karburátory.
Karoserie aut se stávaly mnohem aerodynamičtější, přičemž už tehdy byla dosažena hodnota součinitele čelního odporu vzduchu Cx pod 0,30.
K výraznému zlepšení docházelo také na poli aktivní bezpečnosti. Začalo se více používat nezávislé zavěšení také zadních kol a ve větší míře se začaly objevovat víceprvkové nápravy. A právě do tohoto konceptu velmi dobře zapadal systém aktivního řízení všech kol 4WS (Four Wheel Steering).
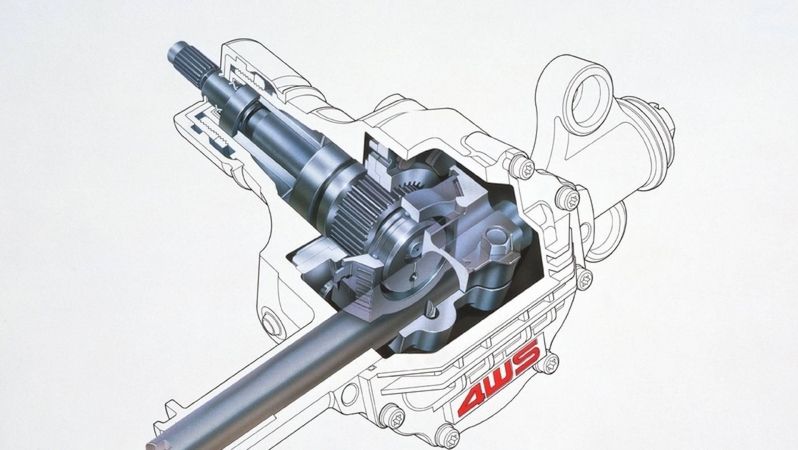
Zadní převodka řízení
Stavební stroje jezdí pomalu
Aktivní řízení všemi koly nebylo v 80. letech ničím novým. Samotná myšlenka řídit vozidlo všemi koly vznikla už ve 30. letech. Následně byla oprášena v období 2. světové války, odkud se dostala do celé řady strojů, jimž měla tato konfigurace řízení usnadňovat manévrování v omezeném prostoru.
V jejich případě se však používalo výhradně schéma, kdy se kola zadní nápravy natáčela v opačném smyslu než kola té přední. Tím se poměrně výrazně zmenšoval poloměr otáčení vozidla. V té době to používal třeba Daimler-Benz u vozidel pro práci v lesích.
Úvahy o tom, nabídnout něco podobného také v osobním autě, se poprvé objevily v roce 1977 u Hondy. Vycházely z toho, že auta již v té době nabízela čtyři brzdy či pohon všech kol. Ovšem ke změnám směru se dosud využívala výhradně přední náprava.
Přetavit nápad v teoretický model měla dvojice inženýrů Shoichi Sano a Osamu Furukawa, kteří u Hondy pracovali v takzvaném šestém bloku vývojového centra Wako R Původní úvahy byly použít již existující technická řešení, ovšem otazník visel nad tím, zda se mají zadní kola natáčet ve stejném smyslu jako ta přední nebo v opačném.

Testovací mula
Furukawa se Sanem se nechali inspirovat řešením u výše zmíněných strojů a rozhodli se pro natáčení zadních kol v opačném směru. Posoudit zvolený koncept měla speciální komise ustanovená v rámci japonského ministerstva dopravy, která se navíc opírala o zkušenosti s těžkými užitkovými vozy, jež řízení více nápravami rovněž používaly.
Po dlouhých diskusích a celé řadě dodatečných výpočtů shledala komise koncepci se zadní nápravou natáčenou v opačném směru k té přední za nevhodnou pro použití v osobním automobilu. Dle zjištění se jako nevyhovující ukázala stabilita jízdy při vyšších rychlostech.
Na základě toho se konstruktéři Hondy rozhodli dále rozpracovat koncepci, v rámci níž by se kola zadní nápravy natáčela v opačném směru než kola přední nápravy v nízkých rychlostech, zatímco ve vyšších by se směr natáčení změnil na souhlasný směr. Princip mechanismu, který by to umožnil, si Honda nechala patentovat v roce 1978. Ovšem teprve za dalších dlouhých devět let se myšlenky obsažené v patentu objevily u prvních zákazníků.
Když vývoj, tak pořádný
Aby si Japonci pojistili úspěch v případě vývoje aktivního řízení všemi koly pro osobní auto, nezabývali se jím pouze inženýři a vývojáři Hondy, ale současně také malá skupinka inženýrů sdružená kolem profesora Oguchiho z Shibarova technologického institutu.
Profesor Oguchi zkoumal systém řízení, u něhož by přední a zadní náprava mohly pracovat nezávisle. Tím by se dalo řídit chování vozidla od nedotáčivého k přetáčivému a obráceně. Sama Honda o této externí skupince, pracující na stejné věci, věděla. Netrvalo dlouho a Furukawa se Sanem začali se skupinou kolem profesora Oguchiho úzce spolupracovat.

Honda Accord
Ostatně proč dělat tutéž věc dvakrát? V rámci společného vývoje vzniklo v laboratoři výše zmíněného institutu testovací zařízení, na němž se zkoušely různé varianty systému 4WS. Skládalo se z dvojice válců, z nichž na každém spočívala jedna z náprav vývojové muly, což bylo vozidlo složené z trubek osazené volantem a řízením.
Válce se mohly různě pohybovat, čímž se simulovalo všemožné vychylování testovací muly (vozidla), a z toho se pak určovaly převodové poměry řízení pro přední a zadní nápravu. Smyslem bylo najít optimální řešení obou převodů. Práce postupovaly poměrně rychle, takže už v dubnu 1981 se mohlo přistoupit k testování skutečného vozidla při jízdě. Ne však v běžném provozu, ale na testovacím oválu Suzuka.
Za tímto účelem vzniklo podivné vozidlo. Jeho přední část byla převzata z někdejší generace Hondy Accord. Na tom by asi nebylo nic divného, kdyby také zadní část auta nevypadala úplně stejně. Prostě se k sobě svařily dvě přední části accorda a testovací auto bylo na světě. Důvodem bylo pravděpodobně použití dvou vlastně předních řiditelných náprav sériového auta, které vývojáři osadili specifickým řízením. Furukawa později vzpomínal, že jízdní dynamika této testovací muly daleko předčila všechna očekávání.
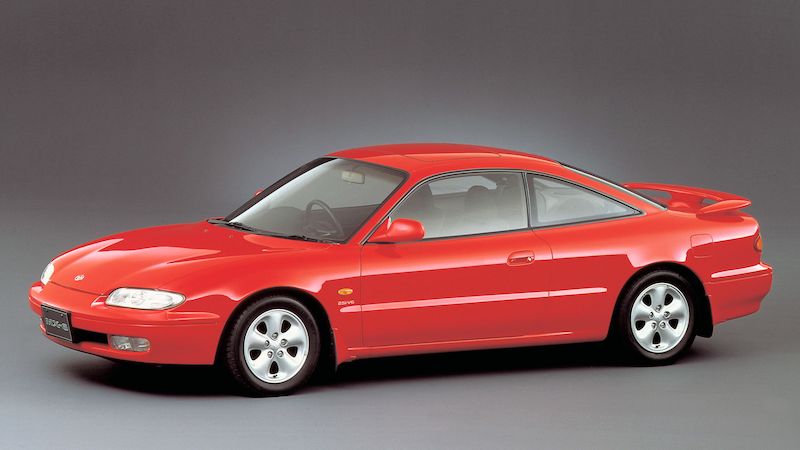
Mazda MX-6
Systém umožňoval natáčet zadní kola v opačném směru než přední při nízkých rychlostech, naproti tomu při vyšších přišlo na řadu souhlasné natočení zadních a předních kol. Při malé rychlosti se tak zmenšoval poloměr otáčení vozidla, při vyšší naopak zvětšoval. Auto se tudíž pohybovalo vlastně krabím chodem. To přispívalo ke stabilitě jízdy. Honda to nazývala „řízením pracujícím v závislosti na rychlosti“.
Původní systém ve vývojovém voze se dvěma předními částmi z accorda měl už tehdy zapracovanou elektronickou řídicí jednotku v kombinaci s variabilním převodem řízení. Jenže jak se ukázalo, pro sériové použití v té době šlo o příliš nákladné řešení, jež by neúměrně zvyšovalo cenu auta na volném trhu.
Mechanika musí stačit
Proto bylo rozhodnuto vyvinout levnější verzi systému řízení všech kol, který by ke své činnosti nepotřeboval tehdy velmi drahou řídicí elektroniku. Vznikl mechanismus, který se stal základem první generace systému aktivního řízení všech kol.
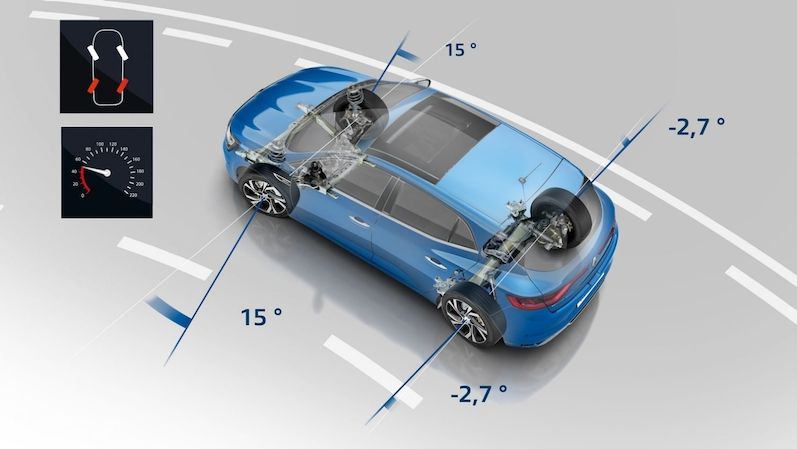
Renault 4Control
Jak to vlastně pracovalo? O tom, zda se zadní kola budou natáčet ve stejném či opačném směru než kola přední, rozhodoval výhradně úhel natočení volantu. Žádné další vstupní veličiny, třeba rychlost jízdy, zde v potaz brány nebyly.
Natáčení zadních kol probíhalo tak, že až do úhlu natočení volantu přibližně 240 stupňů na obě strany se zadní kola natáčela souhlasně jako ta přední. Maximální výchylku dosáhla při úhlu natočení volantu přibližně 140 stupňů. Při ní se vnější přední kolo vychýlilo o úhel osm stupňů, kterému odpovídalo maximální vychýlení vnějšího zadního kola o úhel 1,5 stupně.
Od této hodnoty dále se úhel vychýlení zadních kol postupně zmenšoval, až do uvedené hranice (240 stupňů na volantu), v níž se zadní zadní kola nenatáčela, a tedy zůstávala rovně. V tu chvíli bylo vnější přední kolo natočeno o úhel 15,6 stupně. Od této hodnoty dále, a tedy zvětšujícím se úhlem natočení volantu, se měnil smysl natáčení zadních kol na opačný vůči těm předním. Maximální vychýlení 5,3 stupně zadní kola dosáhla při úhlu vychýlení předních kol 30,3 stupně při současném maximálním natočení volantu o 450 stupňů.
Lepší manévrovatelnost
Při rychlé jízdě v zatáčkách, v nichž obvykle stačí spíše menší úhel natočení volantu, tak zadní kola podporovala stabilitu vozidla. Naopak třeba při otáčení vozu se zlepšovala manévrovatelnost. Auto tedy potřebovalo k otočení menší plochu, než jakou by vyžadoval stejný vůz jen s řízením předními koly.
Technicky to celé bylo vyřešeno následovně: od přední převodky řízení vycházel tuhý hřídel k převodce řízení. Hřídel byl excentrický a na konci otáčel (na excentru) planetovým kolem, které se odvalovalo v planetovém věnci, který byl nepohyblivý.
Z planetového kola vycházel opět excentricky vedený čep, zapadající do takzvaného smýkadla, které bylo součástí posuvné řídicí tyče zadních kol. Svým stranovým posuvným pohybem tyč přímo vychylovala zadní kola, uložená otočně na čepu.
Původní systém Hondy byl unikátní v tom, že pracoval čistě mechanicky. Pouze s využitím vhodné kinematiky ovládacího mechanismu. Nevýhodou byl fakt, že jak už jsme zmínili, nebral v potaz rychlost jízdy a dále ani nezohledňoval vliv tuhosti pneumatik.
A co bylo dál?
Aktivní řízení všech kol v podání Hondy bylo skutečně první aplikací systému ve světovém měřítku. Ne však tou úplně první. Už v roce 1985 uvedl Nissan pouze na domácím trhu kupé Skyline se systémem řízení HICAS (High Capacity Actively Controlled Suspension).
Později pro rok 1989 u superkupé 300 ZX došlo k modernizaci systému, která dostala přídomek Super. Na rozdíl od původního systému brala při řízení v potaz také rychlost jízdy. Na rozdíl od Hondy pracoval HICAS a Super HICAS na elektrohydraulickém principu, a byl tedy mnohem komplexnější.

BMW 850CSi
Dalším, kdo 4WS nabízel krátce po uvedení v Hondě, byla Mazda. Dostupným se stal v typech 626, od roku 1991 v kupé MX-6, novější generaci 626 (kulatá řada GE) a dále od roku 1993 v prestižním velkém Xedosu 9.
Ani u Hondy ale nezaháleli a dál pokračovali ve vývoji řízení všech kol. Čtvrtá generace kupé Prelude, která se oficiálně prodávala také na českém trhu, dostala výrazně vylepšenou verzi systému. Ta se už nespoléhala výhradně na mechaniku, přičemž k ovládání zadních kol použili konstruktéři elektromotor, jehož rotor byl vlastně přímo součástí spojovacích (řídicích) tyčí, které svým posuvem natáčely zadní kola.
Systém 4WS ale na sklonku 80. let požívalo rovněž Mitsubishi, jehož Galant Dynamic4 byl zároveň prvním autem, které mělo současně řízení i pohon všech kol. To ostatně dokazovaly i nápisy na karoserii toho vozu 4WD + 4WS. Krátce nato převzalo systém superkupé 3000 GT. Ani Toyota nechtěla zůstat pozadu. Na rozdíl od zbytku soků z japonských ostrovů ale v Evropě tento systém nikdy nenabízela.
Jak vidíte, jde o samé japonské značky. Zbytek světa se k 4WS stavěl dost odmítavě. Jedinou výjimkou bylo tehdy BMW 850 CSi, jediné evropské auto na dlouhá léta s řízením všech kol, zde pojmenovaným AHK a pracujícím podobně jako Nissan HICAS na elektrohydraulickém principu.
Renesance 4WS
Aut s řízením všech kol pomalu ubývalo a na sklonku 90. let už zbyla v Evropě pouze Honda Prelude, nyní již 5. generace. V Japonsku se aut se 4WS nabízelo i v té době více, byť i tam zájem upadal.
Tehdy se poprvé začal objevovat systém elektronické jízdní stability ESP, který mnohem levněji řešil z hlediska jízdní dynamiky to, co drahý systém řízení všech kol. Nemluvě o již léta existujícím elastokinematickém uložení zadní nápravy, která také výrazně přispívá ke stabilitě vozidla v zatáčce při vysoké rychlosti. ESP dodalo autu potřebnou stabilitu v kritických chvílích i bez natáčení zadních kol. Vylepšovat manévrovatelnost vozidla ale přirozeně neumělo a neumí.

Audi Q5
Doslova renesance systému 4WS přišla v roce 2008 s příchodem sportovní verze Renaultu Laguna III s přídomkem GT. Takzvaný 4Control, jak to Renault dodnes nazývá, využívá k natáčení zadních kol elektromotor, tedy podobně jako Honda u Prelude 4. a 5. generace. Na stejném principu dnes fungují všechny systémy 4WS, konkrétně od BMW, Porsche či Audi (Q7 Mk2). A Japonci? Ti jako by zapomněli na své dřívější průkopnické činy, takže systém 4WS dnes v Evropě nenabízí ani jedno jejich auto.